基于FFT的快速模板匹配:从数学证明到高效实现
模板匹配是计算机视觉中最基础的任务之一,广泛应用于目标检测、图像配准、运动跟踪等领域。OpenCV提供了六种模板匹配方法,但当图像和模板尺寸较大时,直接计算会非常耗时。本文将详细介绍如何利用卷积定理,将模板匹配转化为FFT卷积形式,实现百倍以上的加速。
卷积定理及其证明
卷积定理是信号处理领域最重要的定理之一,它建立了时域(空间域)与频域之间的桥梁。在证明卷积定理之前,我们先回顾傅里叶变换的定义。
傅里叶变换的定义
对于连续函数 f(t),其傅里叶变换定义为:
逆傅里叶变换定义为:
对于离散信号,傅里叶变换和逆变换分别为:
卷积的定义
对于两个函数 f 和 g,它们的卷积定义为:
卷积运算的物理意义是:将函数 g 翻转并平移 t 后,与函数 f 相乘再积分。在信号处理中,卷积描述了一个信号通过线性时不变系统后的输出。
卷积定理的证明
定理:设 f 和 g 是两个函数,F = \mathcal{F}\{f\} 和 G = \mathcal{F}\{g\} 分别是它们的傅里叶变换,则:
或者等价地:
证明:
我们从卷积的傅里叶变换出发进行推导。设 h(t) = (f * g)(t),则 h(t) 的傅里叶变换为:
交换积分顺序(假设函数满足适当的条件使得积分可以交换):
对于内层积分,我们做变量替换。设 u = t - \tau,则 t = u + \tau,dt = du。当 t \to -\infty 时 u \to -\infty,当 t \to \infty 时 u \to \infty。代入得:
这里我们用到了傅里叶变换的定义 G(\omega) = \int_{-\infty}^{\infty} g(u) \, e^{-i\omega u} \, du。
将结果代回 H(\omega) 的表达式:
这就证明了:
对两边取逆傅里叶变换,得到:
证毕。
互相关与卷积的关系
在图像处理中,我们更常用的是互相关运算。互相关与卷积的区别在于不需要翻转核函数。对于二维图像 I 和模板 T,互相关定义为:
互相关与卷积的关系可以通过以下推导得到。设 \hat{T} 是 T 的翻转版本:
则互相关可以表示为:
其中我们做了变量替换 m' = h-1-m,n' = w-1-n。这正是卷积的形式,因此:
互相关的FFT实现
根据卷积定理,卷积可以在频域中计算:
现在需要证明时域翻转对应频域共轭。设 g(t) 的傅里叶变换为 G(\omega),则翻转后的函数 \hat{g}(t) = g(-t) 的傅里叶变换为:
因此,时域翻转对应频域共轭:
最终,互相关的FFT计算公式为:
实际计算时,需要先将图像和模板零填充到相同尺寸,以避免循环卷积的边界效应。设 \tilde{I} 和 \tilde{T} 分别是图像和模板零填充后的结果,填充尺寸为 (H + h - 1) \times (W + w - 1),则:
这个定理的威力在于:直接计算卷积的时间复杂度为 O(N^2),而FFT的时间复杂度仅为 O(N \log N)。
模板匹配的六种方法
OpenCV提供了六种模板匹配方法,每种方法适用于不同的场景。设图像为 I,模板为 T,模板尺寸为 h \times w,像素总数 N = h \cdot w。在位置 (x, y) 处,图像块记为 I_{x,y},其均值为 \bar{I}_{x,y},模板均值为 \bar{T}。
TM_CCORR(互相关) 直接计算图像块与模板的内积:
TM_CCORR_NORMED(归一化互相关) 通过归一化消除光照强度的影响:
TM_SQDIFF(平方差) 计算图像块与模板的欧氏距离平方,值越小表示越匹配:
TM_SQDIFF_NORMED(归一化平方差) 是平方差的归一化版本:
TM_CCOEFF(相关系数) 去除直流分量后计算相关,对光照变化更鲁棒:
TM_CCOEFF_NORMED(归一化相关系数) 是最常用的方法,结果在 [-1, 1] 范围内,1表示完全匹配:
从时域到频域:完整的公式推导
直接计算模板匹配需要对图像中每个位置都遍历整个模板,时间复杂度为 O(H \cdot W \cdot h \cdot w)。利用FFT,我们可以将所有位置的计算转化为一次频域运算,复杂度降为 O(H \cdot W \cdot \log(H \cdot W))。下面详细推导每种方法的FFT实现。
TM_CCORR:互相关的FFT实现
TM_CCORR直接计算图像与模板的互相关。根据互相关的定义:
在前面的卷积定理证明中,我们已经推导出互相关的FFT计算公式:
现在需要说明实际计算时的具体步骤。首先,为了避免循环卷积的边界效应,需要将图像和模板零填充到相同尺寸。填充尺寸必须满足:
通常取 H_f = H + h - 1 和 W_f = W + w - 1。设填充后的图像和模板分别为 \tilde{I} 和 \tilde{T},则:
结果 C_{full} 的尺寸为 (H + h - 1) \times (W + w - 1),这是"full"模式的互相关,包含了模板部分超出图像边界的情况。对于模板匹配,我们需要的是"valid"模式,即模板完全在图像内部的区域。valid模式的结果尺寸为 (H - h + 1) \times (W - w + 1),对应于 C_{full} 的左上角区域:
TM_CCORR_NORMED:归一化互相关的FFT实现
归一化互相关的公式为:
分子是互相关 C(x, y),已经可以用FFT计算。分母包含两部分:图像块的能量 \sum_{m,n} I(x+m, y+n)^2 和模板的能量 \sum_{m,n} T(m, n)^2。
模板的能量是常数,可以预先计算:
图像块的能量则随位置变化。定义图像平方的窗口和:
这个式子的含义是:对于每个位置 (x, y),计算以该位置为起点的 h \times w 图像块中所有像素的平方和。
关键观察是:S_2(x, y) 本质上也是一种互相关,只是把模板换成了全1矩阵。设 \mathbf{1} 是一个 h \times w 的全1矩阵,则:
因此,S_2 可以用FFT计算:
其中 \tilde{I}^2 是图像平方后零填充的结果,\tilde{\mathbf{1}} 是全1矩阵零填充的结果。
最终,归一化互相关的FFT实现为:
TM_SQDIFF:平方差的FFT实现
平方差的公式为:
直接看这个公式,似乎与互相关没有关系。但如果我们展开平方项,就会发现其中的联系:
现在我们逐项分析:
第一项 \sum_{m,n} I(x+m, y+n)^2 正是前面定义的 S_2(x, y),即图像平方的窗口和。
第二项 \sum_{m,n} I(x+m, y+n) \cdot T(m, n) 正是互相关 C(x, y)。
第三项 \sum_{m,n} T(m, n)^2 是模板能量 S_T,是常数。
因此,平方差可以表示为:
或者写成更简洁的形式:
三项都可以用FFT高效计算:S_2 是图像平方与全1矩阵的互相关,C 是图像与模板的互相关,S_T 是预先计算的常数。
TM_SQDIFF_NORMED:归一化平方差的FFT实现
归一化平方差的公式为:
分子已经推导为 S_2(x, y) + S_T - 2C(x, y)。分母与TM_CCORR_NORMED的分母完全相同,即 \sqrt{S_2(x, y) \cdot S_T}。
因此:
TM_CCOEFF:相关系数的FFT实现
相关系数方法的核心思想是去除均值后计算相关,这样可以消除光照强度的影响。公式为:
其中 \bar{I}_{x,y} 是图像块在位置 (x, y) 处的均值,\bar{T} 是模板的均值:
为了将这个公式转化为可以用FFT计算的形式,我们需要展开它。首先展开乘积:
将求和分配到每一项:
现在逐项分析:
第一项 \sum_{m,n} I(x+m, y+n) \cdot T(m, n) 是互相关 C(x, y)。
第二项 \sum_{m,n} I(x+m, y+n) 是图像块的像素和,记为 S_1(x, y)。
第三项 \sum_{m,n} T(m, n) 是模板的像素和,记为 S_{T1},是常数。
第四项中,N 是模板像素数,\bar{I}_{x,y} \cdot \bar{T} \cdot N 可以进一步简化。
注意到 \bar{T} = S_{T1}/N 和 \bar{I}_{x,y} = S_1(x, y)/N,代入第三项和第四项:
可以看到,第三项和第四项正好相互抵消!因此:
将 \bar{T} = S_{T1}/N 代入:
现在需要证明 S_1(x, y) 也可以用FFT计算。S_1(x, y) 的定义是:
这正是图像与全1矩阵的互相关:
因此:
TM_CCOEFF_NORMED:归一化相关系数的FFT实现
归一化相关系数是最复杂也是最常用的方法。公式为:
分子已经推导完毕,是 R_{CCOEFF}(x, y) = C(x, y) - S_{T1} \cdot S_1(x, y) / N。
现在需要推导分母。分母包含图像块和模板的方差。首先推导图像块的方差:
将 \bar{I}_{x,y} = S_1(x, y)/N 代入:
这正是图像块的方差,记为 \text{Var}_I(x, y)。
同理,模板的方差为:
记为 \text{Var}_T,这是一个常数,可以预先计算。
最终,归一化相关系数的FFT实现为:
统一的计算框架
通过上述推导,我们发现所有六种方法都可以用三个FFT计算出的量来表示。这三个量分别是:
C = I \star T,即图像与模板的互相关,用于计算分子中的相关项。
S_1 = I \star \mathbf{1},即图像与全1矩阵的互相关,用于计算图像块的像素和。
S_2 = I^2 \star \mathbf{1},即图像平方与全1矩阵的互相关,用于计算图像块的能量。
加上三个模板常数:S_T = \sum T^2(模板能量),S_{T1} = \sum T(模板像素和),N = h \cdot w(模板像素数),就可以计算出所有六种匹配结果。
这种统一的框架不仅简化了实现,还保证了计算效率。具体来说,只需要对图像 \tilde{I} 做一次FFT,对图像平方 \tilde{I}^2 做一次FFT,对模板 \tilde{T} 做一次FFT,对全1矩阵 \tilde{\mathbf{1}} 做一次FFT,然后进行三次频域乘积和三次逆FFT,就能得到 C、S_1 和 S_2 三个核心量。后续的所有计算都是简单的逐点运算,复杂度仅为 O(H \cdot W)。
效果对比
运行代码后,我们可以得到FFT实现与OpenCV的对比结果。下图展示了六种方法的匹配热力图:
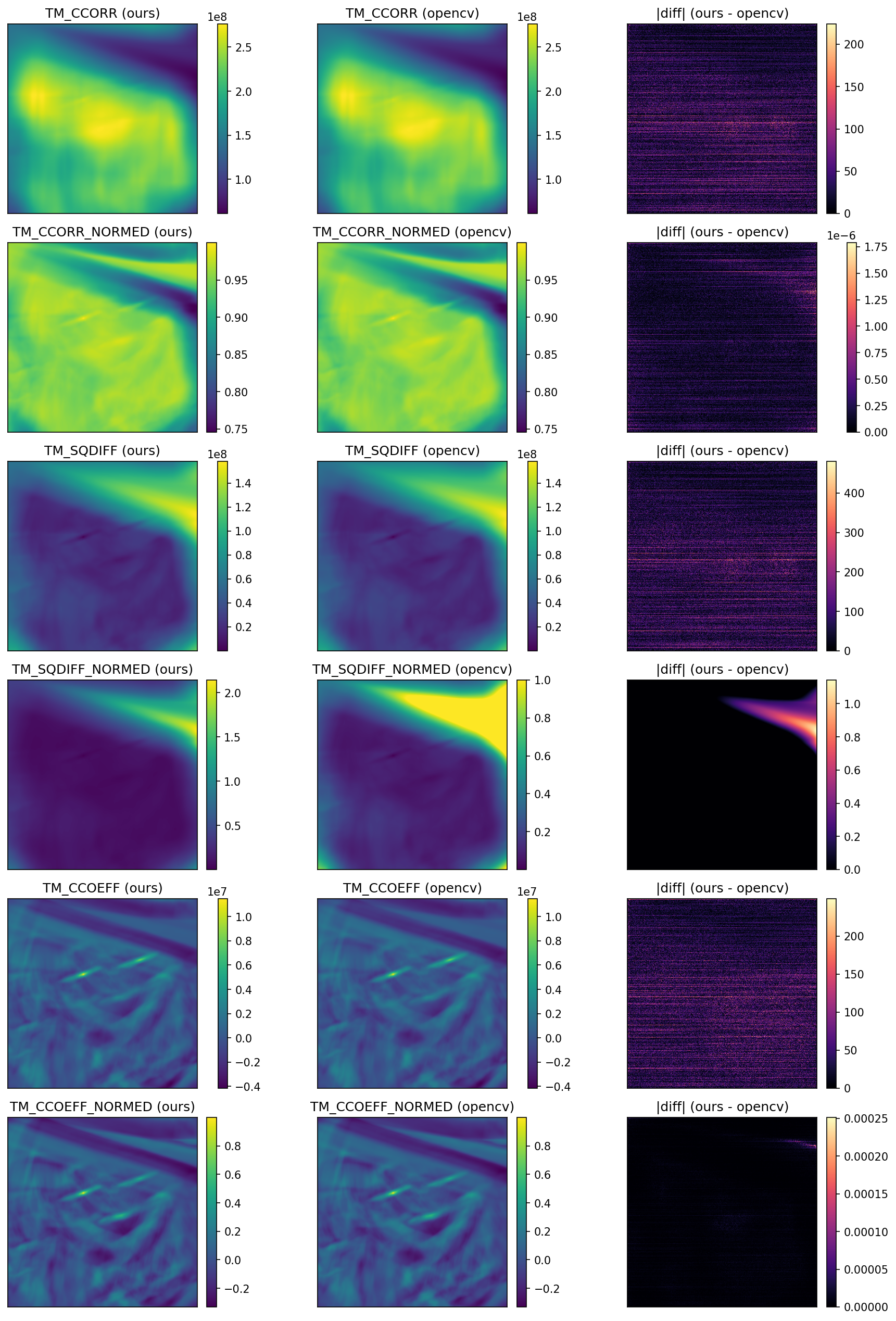
从图中可以看到,我们的FFT实现与OpenCV的结果几乎完全一致,差值图显示误差在可忽略的范围内。右列的差值图颜色接近黑色,说明两种方法的数值差异极小。
最佳匹配位置的可视化结果如下:
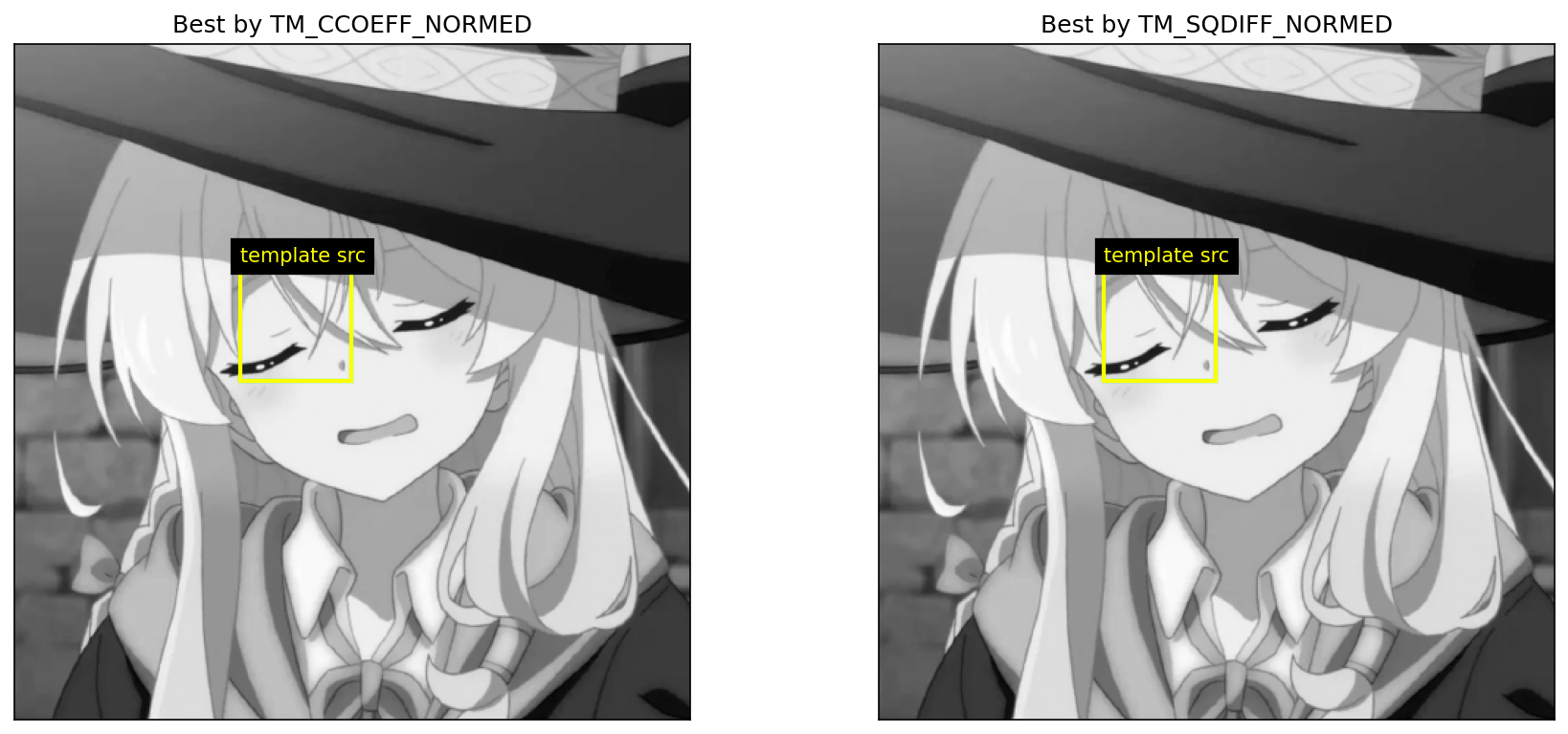
可以看到我们使用的FFT加速的结果和OpenCV的模板匹配实现基本一致。
数值精度验证
从运行输出的数值对比可以看出,FFT实现与OpenCV的高度一致:
=== 数值对比(与 cv2.matchTemplate) ===
TM_CCORR: max_err=2.240000e+02, mean_err=3.329635e+01, rel_max=8.109e-07, rel_mean=1.205e-07
TM_CCORR_NORMED: max_err=1.788139e-06, mean_err=1.768073e-07, rel_max=1.788e-06, rel_mean=1.768e-07
TM_SQDIFF: max_err=4.800000e+02, mean_err=6.757257e+01, rel_max=3.034e-06, rel_mean=4.272e-07
TM_SQDIFF_NORMED: max_err=1.142450e+00, mean_err=3.005487e-02, rel_max=1.142e+00, rel_mean=3.005e-02
TM_CCOEFF: max_err=2.491250e+02, mean_err=3.909091e+01, rel_max=2.171e-05, rel_mean=3.407e-06
TM_CCOEFF_NORMED: max_err=2.512969e-04, mean_err=4.180090e-06, rel_max=2.513e-04, rel_mean=4.180e-06
未归一化的误差看起来很大是因为量纲,rel_mean是考虑到量纲后的误差
性能分析
FFT方法的时间复杂度为 O(H \cdot W \cdot \log(H \cdot W)),与模板尺寸无关。对于大图像配合大模板的场景,加速效果尤为显著。
| 方法 | 复杂度 |
|---|---|
| 直接计算 | O(H \cdot W \cdot h \cdot w) |
| FFT方法 | O(H \cdot W \cdot \log(H \cdot W)) |
图片较大时,加速比可达百倍以上。这使得FFT模板匹配特别适用于遥感图像分析、医学影像处理、实时视频跟踪等需要处理大尺寸图像的场景。
总结
卷积定理为模板匹配提供了一个优雅的加速方案。通过将时域中的滑动窗口计算转化为频域中的逐点乘积,我们实现了从 O(N^2 \cdot M^2) 到 O(N^2 \log N) 的复杂度降低。更重要的是,所有六种OpenCV模板匹配方法都可以统一到同一个FFT计算框架中,只需要三次FFT变换就能得到全部结果。
这种加速方法在保持数值精度的同时,大幅提升了计算效率,使得模板匹配能够应用于更大规模的图像处理任务。完整的实现代码已包含在本文中,读者可以直接运行验证效果。
代码
import numpy as np
import cv2
import matplotlib.pyplot as plt
import argparse
from pathlib import Path
def fft_xcorr2d_full(a, b):
"""
full 互相关 a ⋆ b,尺寸 (Ha+Hb-1, Wa+Wb-1)
实现:ifft2( FFT(a_pad) * conj(FFT(b_pad)) )
"""
Ha, Wa = a.shape
Hb, Wb = b.shape
Hf, Wf = Ha + Hb - 1, Wa + Wb - 1
Fa = np.fft.rfft2(a, s=(Hf, Wf))
Fb = np.fft.rfft2(b, s=(Hf, Wf))
Fc = Fa * np.conj(Fb)
c_full = np.fft.irfft2(Fc, s=(Hf, Wf))
return c_full
def valid_from_full_xcorr(full, H, W, h, w):
"""
对于“互相关”的 full 结果,valid(窗口左上角对齐)应取:
[0:H-h+1, 0:W-w+1]
"""
return full[0:H - h + 1, 0:W - w + 1]
def compute_fft_stats(I, T):
"""
用同一个坐标系(互相关 + 顶左对齐 valid)计算:
- C = I ⋆ T
- S1 = I 与 Ones 的相关(窗口和)
- S2 = I^2 与 Ones 的相关(窗口平方和)
返回 C, S1, S2 以及模板常量 ST, ST2, var_T, N
"""
H, W = I.shape
h, w = T.shape
N = float(h * w)
# 分子:互相关
C_full = fft_xcorr2d_full(I, T)
C = valid_from_full_xcorr(C_full, H, W, h, w)
# 同样用互相关计算窗口统计量,确保对齐一致
Ones = np.ones_like(T, dtype=I.dtype)
S1_full = fft_xcorr2d_full(I, Ones)
S1 = valid_from_full_xcorr(S1_full, H, W, h, w)
S2_full = fft_xcorr2d_full(I * I, Ones)
S2 = valid_from_full_xcorr(S2_full, H, W, h, w)
ST = float(T.sum())
ST2 = float((T * T).sum())
var_T = ST2 - (ST * ST) / N
return C, S1, S2, ST, ST2, var_T, N
def match_template_fft(image, template, use_float32=True):
"""
六种方法(与 OpenCV 定义一致),全部基于“频域互相关 + 顶左对齐 valid”
"""
dtype = np.float32 if use_float32 else np.float64
I = image.astype(dtype, copy=False)
T = template.astype(dtype, copy=False)
C, S1, S2, ST, ST2, var_T, N = compute_fft_stats(I, T)
# 1) CCORR
R_CCORR = C
# 2) CCORR_NORMED
denom_ccorr = np.sqrt(S2 * ST2).astype(dtype)
R_CCORR_NORMED = np.divide(
R_CCORR, denom_ccorr, out=np.zeros_like(R_CCORR), where=denom_ccorr > 0
)
# 3) SQDIFF
R_SQDIFF = S2 + ST2 - 2.0 * C
# 4) SQDIFF_NORMED
denom_sqdiff = np.sqrt(S2 * ST2).astype(dtype)
R_SQDIFF_NORMED = np.divide(
R_SQDIFF, denom_sqdiff, out=np.zeros_like(R_SQDIFF), where=denom_sqdiff > 0
)
# 5) CCOEFF
R_CCOEFF = C - (S1 * ST) / dtype(N)
# 6) CCOEFF_NORMED
var_I = S2 - (S1 * S1) / dtype(N)
var_I = np.maximum(var_I, 0.0).astype(dtype)
var_T_safe = max(var_T, 0.0)
denom_ccoef = np.sqrt(var_I * dtype(var_T_safe)).astype(dtype)
R_CCOEFF_NORMED = np.divide(
R_CCOEFF, denom_ccoef, out=np.zeros_like(R_CCOEFF), where=denom_ccoef > 0
)
return {
"TM_CCORR": R_CCORR,
"TM_CCORR_NORMED": R_CCORR_NORMED,
"TM_SQDIFF": R_SQDIFF,
"TM_SQDIFF_NORMED": R_SQDIFF_NORMED,
"TM_CCOEFF": R_CCOEFF,
"TM_CCOEFF_NORMED": R_CCOEFF_NORMED
}
def compare_with_opencv(image, template):
methods = {
"TM_CCORR": cv2.TM_CCORR,
"TM_CCORR_NORMED": cv2.TM_CCORR_NORMED,
"TM_SQDIFF": cv2.TM_SQDIFF,
"TM_SQDIFF_NORMED": cv2.TM_SQDIFF_NORMED,
"TM_CCOEFF": cv2.TM_CCOEFF,
"TM_CCOEFF_NORMED": cv2.TM_CCOEFF_NORMED,
}
ours = match_template_fft(image, template, use_float32=True)
report = {}
diffs = {}
opencv_maps = {}
for name, m in methods.items():
opencv_res = cv2.matchTemplate(image.astype(np.float32),
template.astype(np.float32),
m)
ours_map = ours[name].astype(opencv_res.dtype, copy=False)
diff = ours_map - opencv_res
max_err = float(np.max(np.abs(diff)))
mean_err = float(np.mean(np.abs(diff)))
scale = float(max(1.0, np.max(np.abs(opencv_res))))
rel_max = max_err / scale
rel_mean = mean_err / scale
report[name] = {
"opencv_shape": opencv_res.shape,
"our_shape": ours_map.shape,
"max_abs_error": max_err,
"mean_abs_error": mean_err,
"rel_max_error": rel_max,
"rel_mean_error": rel_mean
}
diffs[name] = diff
opencv_maps[name] = opencv_res
return report, ours, opencv_maps, diffs
def draw_results(image, template, ours, opencv_maps, diffs, src_top_left, save_path=None):
"""
可视化:
- 每种方法一行:ours / opencv / |diff|
- 另绘原图+最佳匹配框(用 CCOEFF_NORMED 和 SQDIFF_NORMED)
"""
methods_order = [
"TM_CCORR",
"TM_CCORR_NORMED",
"TM_SQDIFF",
"TM_SQDIFF_NORMED",
"TM_CCOEFF",
"TM_CCOEFF_NORMED",
]
nrows, ncols = len(methods_order), 3
fig, axes = plt.subplots(nrows, ncols, figsize=(12, 2.8*nrows), constrained_layout=True)
if nrows == 1:
axes = np.array([axes])
for i, name in enumerate(methods_order):
ax1, ax2, ax3 = axes[i]
m1 = ours[name]
m2 = opencv_maps[name]
d = np.abs(diffs[name])
im1 = ax1.imshow(m1, cmap="viridis")
ax1.set_title(f"{name} (ours)")
fig.colorbar(im1, ax=ax1, fraction=0.046, pad=0.04)
im2 = ax2.imshow(m2, cmap="viridis")
ax2.set_title(f"{name} (opencv)")
fig.colorbar(im2, ax=ax2, fraction=0.046, pad=0.04)
im3 = ax3.imshow(d, cmap="magma")
ax3.set_title(f"|diff| (ours - opencv)")
fig.colorbar(im3, ax=ax3, fraction=0.046, pad=0.04)
for ax in (ax1, ax2, ax3):
ax.set_xticks([])
ax.set_yticks([])
if save_path:
fig.savefig(save_path[0], dpi=150, bbox_inches='tight')
print(f"Saved: {save_path[0]}")
else:
plt.show()
plt.close(fig)
# 在原图上画最佳匹配(以 CCOEFF_NORMED 最大值和 SQDIFF_NORMED 最小值为例)
H, W = image.shape
h, w = template.shape
def draw_rect_on_image(ax, top_left, color='lime', label=''):
r0, c0 = top_left
ax.add_patch(plt.Rectangle((c0, r0), w, h, fill=False, edgecolor=color, linewidth=2))
if label:
ax.text(c0, r0-5, label, color=color, fontsize=10, backgroundcolor='k')
best_maps = [
("TM_CCOEFF_NORMED", True, "max"), # 最大越好
("TM_SQDIFF_NORMED", False, "min"), # 最小越好
]
fig2, ax2 = plt.subplots(1, 2, figsize=(12, 5), constrained_layout=True)
for k, (name, is_max, tag) in enumerate(best_maps):
if is_max:
best_pos_ours = np.unravel_index(int(np.argmax(ours[name])), ours[name].shape)
best_pos_cv = np.unravel_index(int(np.argmax(opencv_maps[name])), opencv_maps[name].shape)
else:
best_pos_ours = np.unravel_index(int(np.argmin(ours[name])), ours[name].shape)
best_pos_cv = np.unravel_index(int(np.argmin(opencv_maps[name])), opencv_maps[name].shape)
ax = ax2[k]
ax.imshow(image, cmap='gray')
draw_rect_on_image(ax, (int(best_pos_ours[0]), int(best_pos_ours[1])), color='lime', label=f"ours {tag}")
draw_rect_on_image(ax, (int(best_pos_cv[0]), int(best_pos_cv[1])), color='cyan', label=f"opencv {tag}")
draw_rect_on_image(ax, (int(src_top_left[0]), int(src_top_left[1])), color='yellow', label="template src")
ax.set_title(f"Best by {name}")
ax.set_xticks([]); ax.set_yticks([])
if save_path and len(save_path) > 1:
fig2.savefig(save_path[1], dpi=150, bbox_inches='tight')
print(f"Saved: {save_path[1]}")
else:
plt.show()
plt.close(fig2)
def main():
parser = argparse.ArgumentParser()
parser.add_argument("--image", type=str, default="test.png", help="输入灰度图路径,默认 test.png")
parser.add_argument("--x", type=int, default=None, help="模板左上角 x(行)")
parser.add_argument("--y", type=int, default=None, help="模板左上角 y(列)")
parser.add_argument("--h", type=int, default=None, help="模板高度")
parser.add_argument("--w", type=int, default=None, help="模板宽度")
args = parser.parse_args()
img_path = Path(args.image)
if not img_path.exists():
raise FileNotFoundError(f"找不到图像文件: {img_path}")
# 读灰度
image = cv2.imread(str(img_path), cv2.IMREAD_GRAYSCALE)
if image is None:
raise RuntimeError("读取图像失败,请确认路径与文件格式。")
image = image.astype(np.float32)
H, W = image.shape
# 默认模板:图像中部区域
h = args.h if args.h is not None else max(16, H // 6)
w = args.w if args.w is not None else max(16, W // 6)
x0 = args.x if args.x is not None else max(0, (H // 3))
y0 = args.y if args.y is not None else max(0, (W // 3))
# 防越界
x0 = min(max(0, x0), max(0, H - h))
y0 = min(max(0, y0), max(0, W - w))
template = image[x0:x0+h, y0:y0+w].copy()
# 计算与对比
report, ours, opencv_maps, diffs = compare_with_opencv(image, template)
print("=== 数值对比(与 cv2.matchTemplate) ===")
for k, v in report.items():
print(f"{k}: max_err={v['max_abs_error']:.6e}, mean_err={v['mean_abs_error']:.6e}, "
f"rel_max={v['rel_max_error']:.3e}, rel_mean={v['rel_mean_error']:.3e}")
# 归一化方法应在合理范围(CCOEFF_NORMED、CCORR_NORMED ∈ [-1,1];SQDIFF_NORMED ∈ [0,2])
for name in ["TM_CCORR_NORMED", "TM_SQDIFF_NORMED", "TM_CCOEFF_NORMED"]:
m = ours[name]
print(f"{name} range: min={float(m.min()):.6f}, max={float(m.max()):.6f}")
# 可视化
draw_results(image, template, ours, opencv_maps, diffs, src_top_left=(x0, y0),
save_path=["matching_results.png", "best_match_locations.png"])
if __name__ == "__main__":
main()